HSV SDK (高速ビジョン開発プラットフォーム)
高速ビジョン技術の概要
高速ビジョンは、画像を捉える目にあたるビジョンセンサーがリアルタイムに画像の特徴を認識・判別して結果を出力する事により、極めて速い対応動作を可能とします。様々な分野への応用が考えられますが、例えば製造ラインに適用することで自動検査、リアルタイム制御への転換が可能となり、生産効率の向上と不良率の低下を同時に実現することができます。
HSV SDK (High Speed Vision Software Development Kit)
HSV SDKは高速ビジョンの応用アプリケーションを開発するための標準プラットフォームです。
-
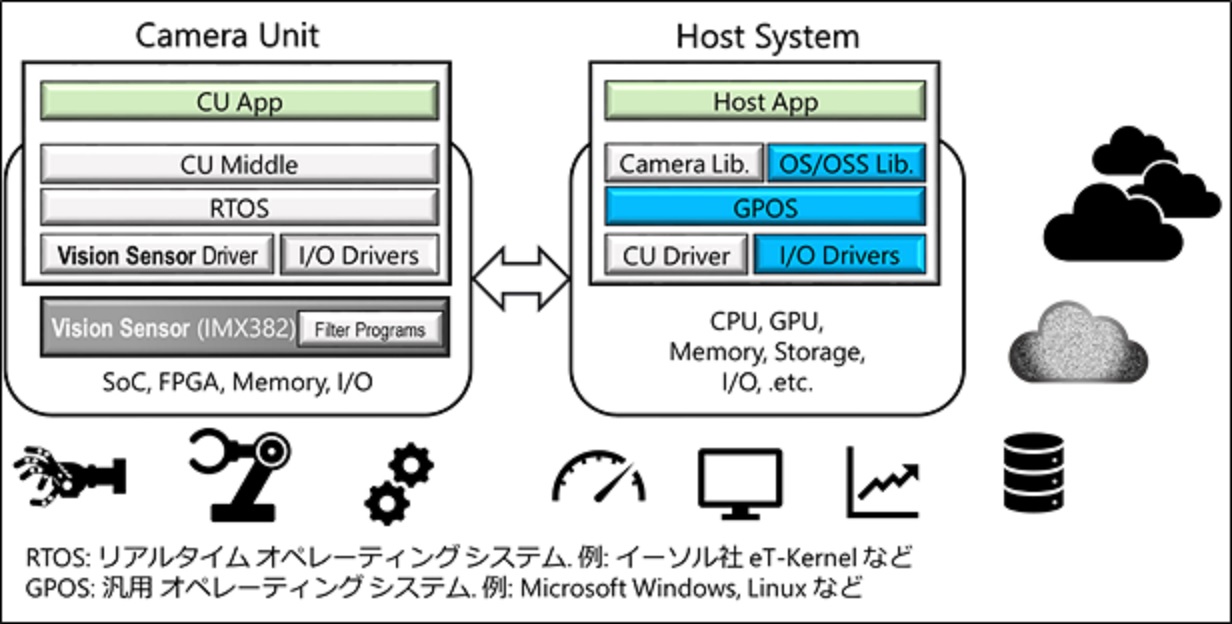
HSV SDK は毎秒1,000 フレームの高速ビジョンセンサー『IMX382』を搭載した評価ボードと開発用ソフトウェアパッケージで構成されており、リアルタイム性を重視したCamera Unitアプリケーションと、汎用性を重視したHostアプリケーションを短期間で開発できる環境を提供します。
-
Camera Unit は汎用的なインタフェースとFPGA を搭載したSoC 等で構成されており、リアルタイムOS が動作するハードウェアです。
-
Camera Unit をHost System に接続することで画像データ、センシング情報を取り込み、事象の確認や解析などを行うHost アプリケーションの開発ができます。
お問い合わせ先:このメールアドレスはスパムボットから保護されています。閲覧するにはJavaScriptを有効にする必要があります。
HSV SDKの基本構成
- HSV SDKを構成する評価ボードのCamera Unitと、Host Systemなどの全体概念図は、以下の通りです。
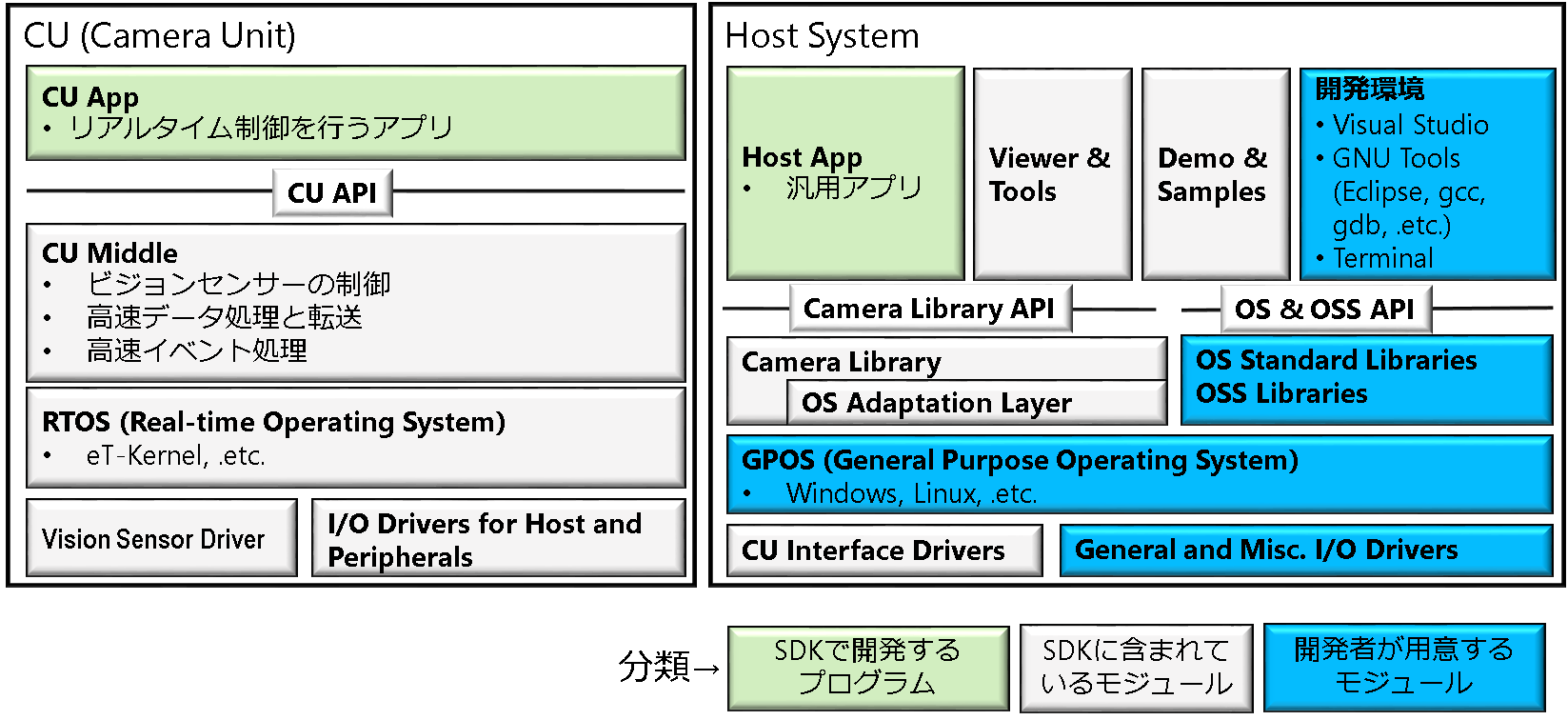
- SDKのソフトウェアの構成は以下の通りです。
高速ビジョン技術の応用
1.遅延のない高精度トラッキングを実現
- 動体(ジェスチャ等の動作を含む)を、遅れなく、高い精度でトラッキングし、認識・判別することができます。
- 認識・判別処理は、画面内に任意に設定できる検出枠の範囲で個別に定めた閾値に対する高低で判別され、例えば1000fpsの場合は1ms毎にその結果が出力されます。
- その処理出力を直接動作系へフィードバックすることで位置補整が瞬時に行われ、高速に移動する対象物が予想外の動きをした場合でも正確な追跡と対応動作が可能となります。
- 高フレームレートにより画像フレーム間での対象物の移動距離が短く、それにより対象物の探索スペースが小さくできるため認識アルゴリズムの効率化が図れます。
2.高速ビジョンの用途
-
高速ビジョンの認識・判別機能をFA分野に応用する事でリアルタイムの高速検査が可能となり、タクトタイムを犠牲にしない全数検査など、効率と歩留まりをハイレベルで両立できます。
-
従来の産業用ロボットはプログラムによって指定された座標へ移動するのが一般的ですが、高速ビジョンの高速性と追跡機能を活用することによりロボットへのリアルタイムなフィードバックが可能となり、対象物の動きや状態に応じてロボットが自律的な動作や対応がとれるようになり、ロボットへのティーチング作業の効率化や、生産性の向上に貢献します。
-
生産ラインへ適用する事により、異常や故障の発生を瞬時に捉え、迅速にシステムへの停止指示をかけることなども可能となります。
-
また、映像情報の高速フィードバックによりカメラの振動を相殺して安定した映像取得が可能となります。応用例として、トンネル内側壁の高速検査や、高速回転体の状態確認等、従来不可能だった高速運動下での安定した状態観測が実現できます。
-
更に映像情報のリアルタイムフィードバックにより高速移動体への安定した映像投影ができるため、高精度なダイナミックプロジェクションマッピングが可能です。
3.高速ビジョンの実装イメージ
-
高速画像処理+リアルタイムセンシングの特徴を生かすことで物体の動きを予測した適応動作が不要となり、極めて高速かつ正確な制御が可能になります。
-
様々な分野への応用が考えられますが、例えば製造ラインへの応用により従来人間が行っていた抜き取り検査を全数自動検査に置き換えたり、産業用ロボットへの応用によりリアルタイム制御に基づいた正確かつ高速な動作を自律的に行う事が可能となり、歩留まりの向上と生産効率の改善をハイレベルで両立できます。
《 こちらの製品の取扱先》
|
|
|